EM2 SN149
- When this positioner was first cabled up as part of SET A, the driver was bad for phi and we were unable to command it properly. This was corrected later by replacing the driver and the positioner was cabled up once again as part of SET D
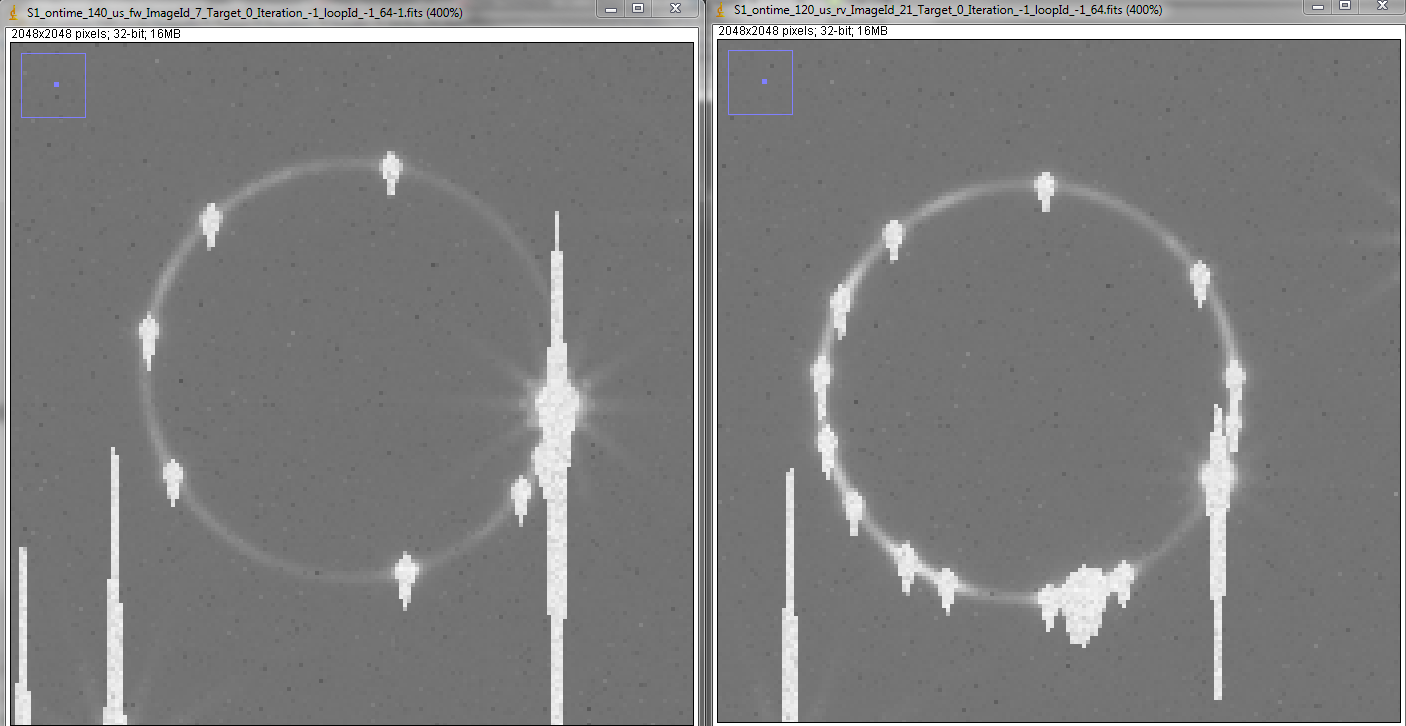
- Theta ontimes were determined by moving the positioner 20 iterations of 350steps each at different ontimes to see which makes it all the way around. This resulted in selecting 0.14 and 0.12ms for FWD and REV respectively. See images below:
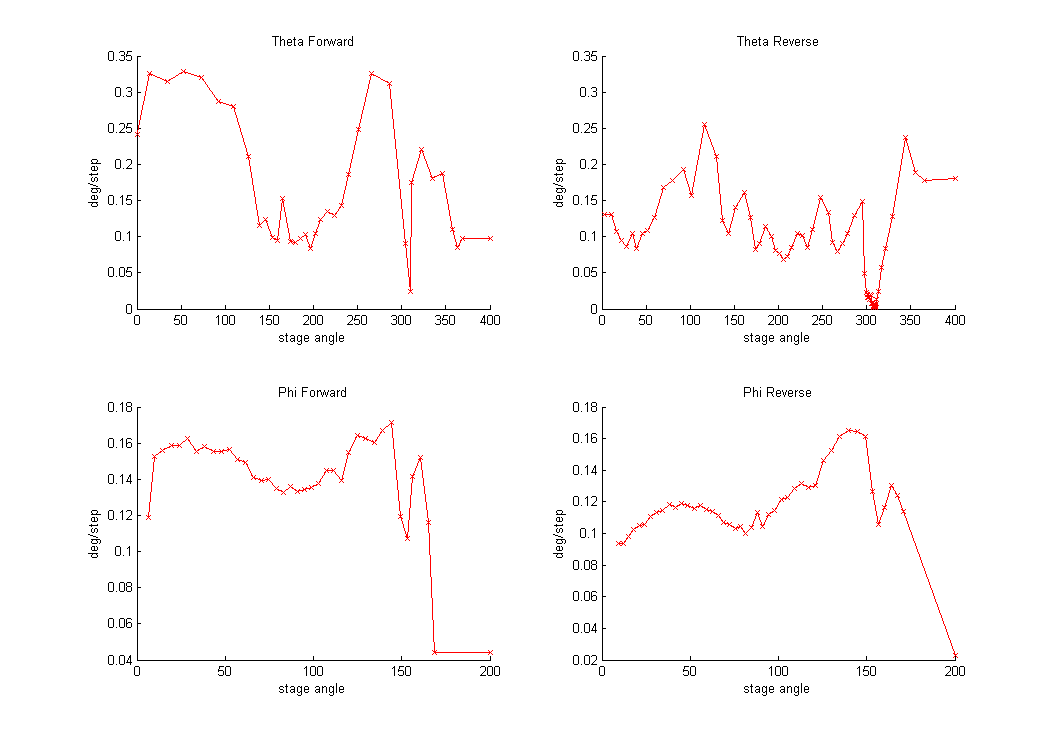
- The initial motor map showed a sticky spot in reverse on theta as seen below
- The first four target runs all were based on the above map but shifted with a DC offset based on data from the previous run. This did not seem to help, it actually made things worse here.
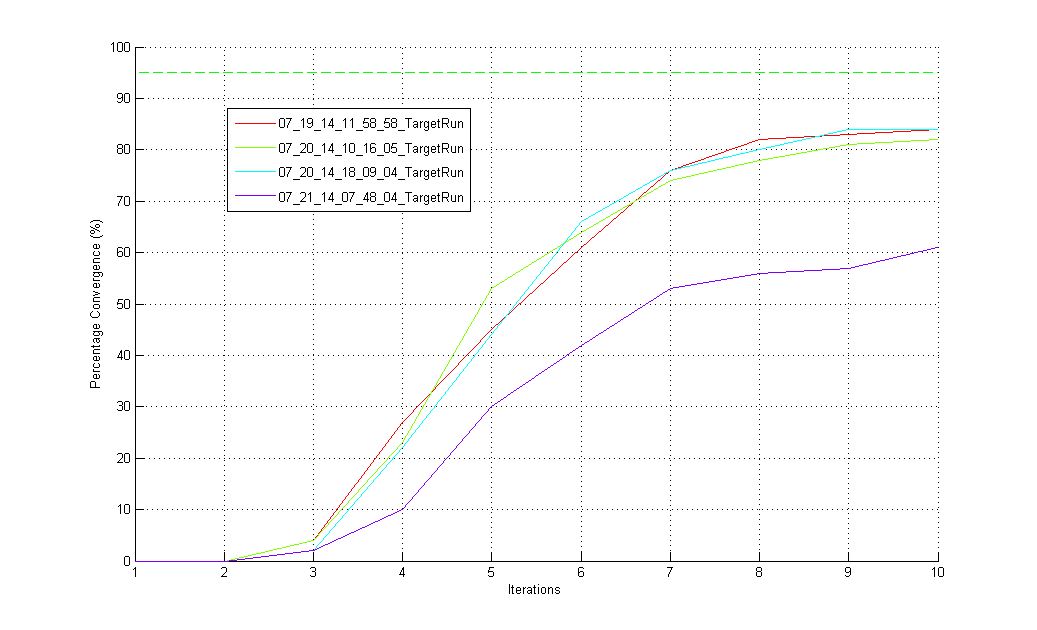
- Analysis of these target runs revealed that SN149 was having trouble getting the angular resolution necessary to converge on targets once it was very close to them. The minimum discrete move of 1step was resulting in moves too large to avoid overshooting the target again and again.
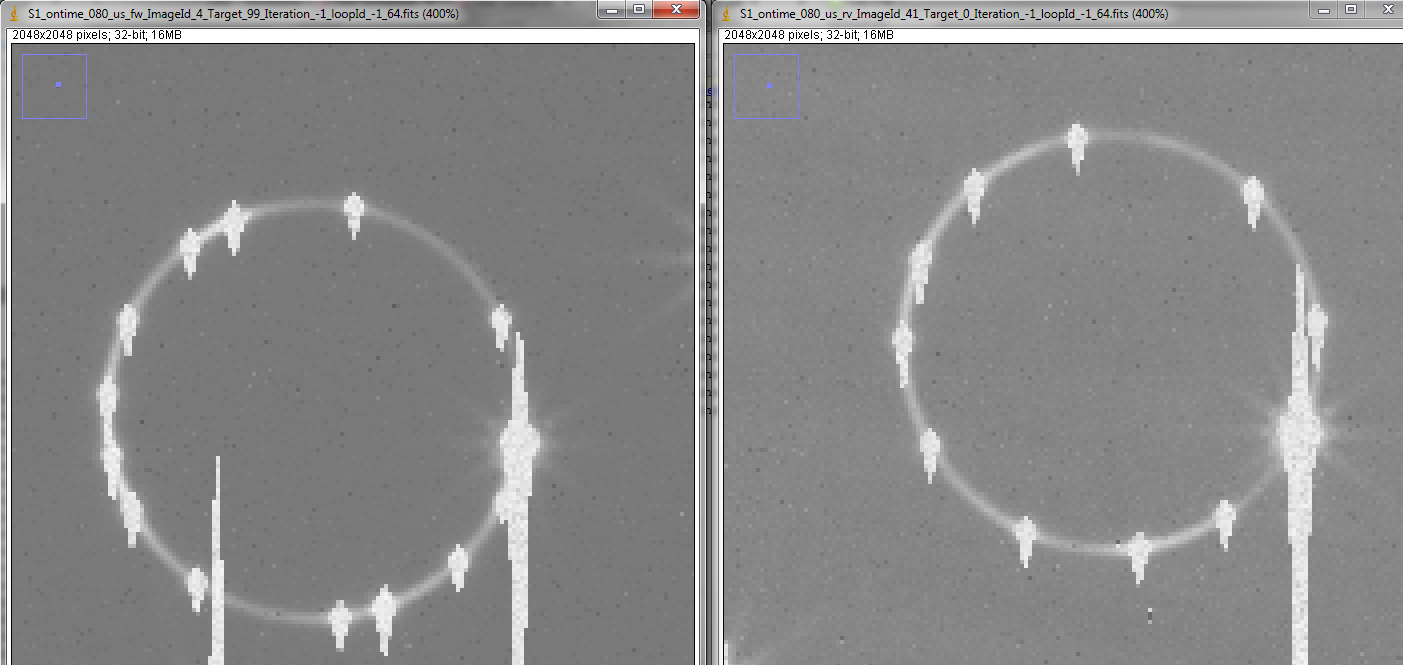
- Ontimes were rested again and this time a lower one of 0.08ms was selected for both FWD and REV on theta. The images for that test are shown below:
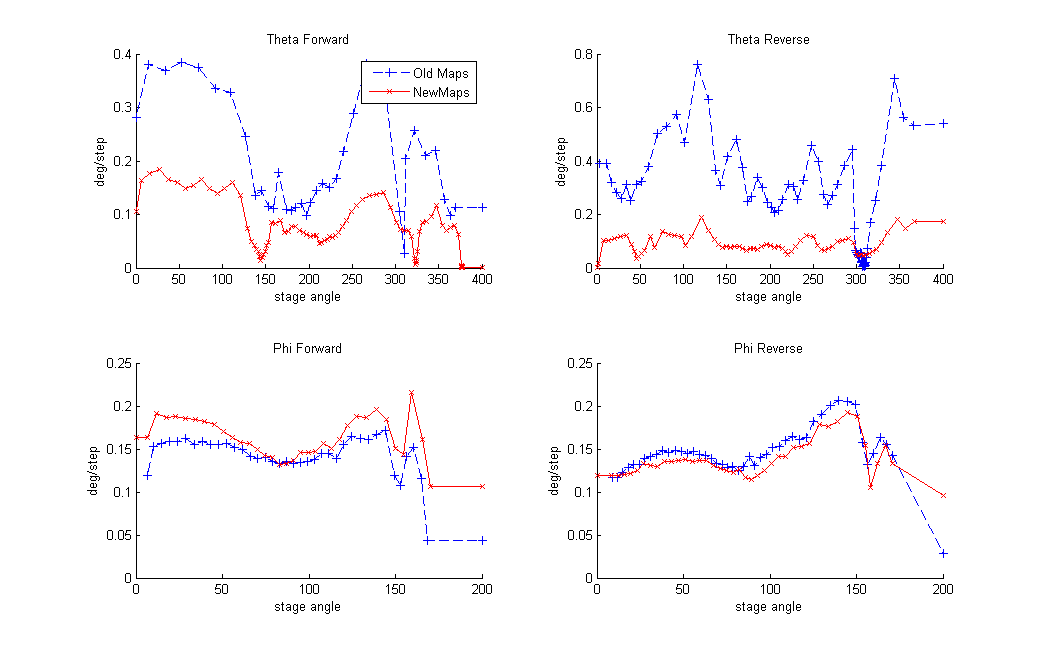
- A new motor map was created for these lower ontimes on theta and is shown below compared with the previous maps
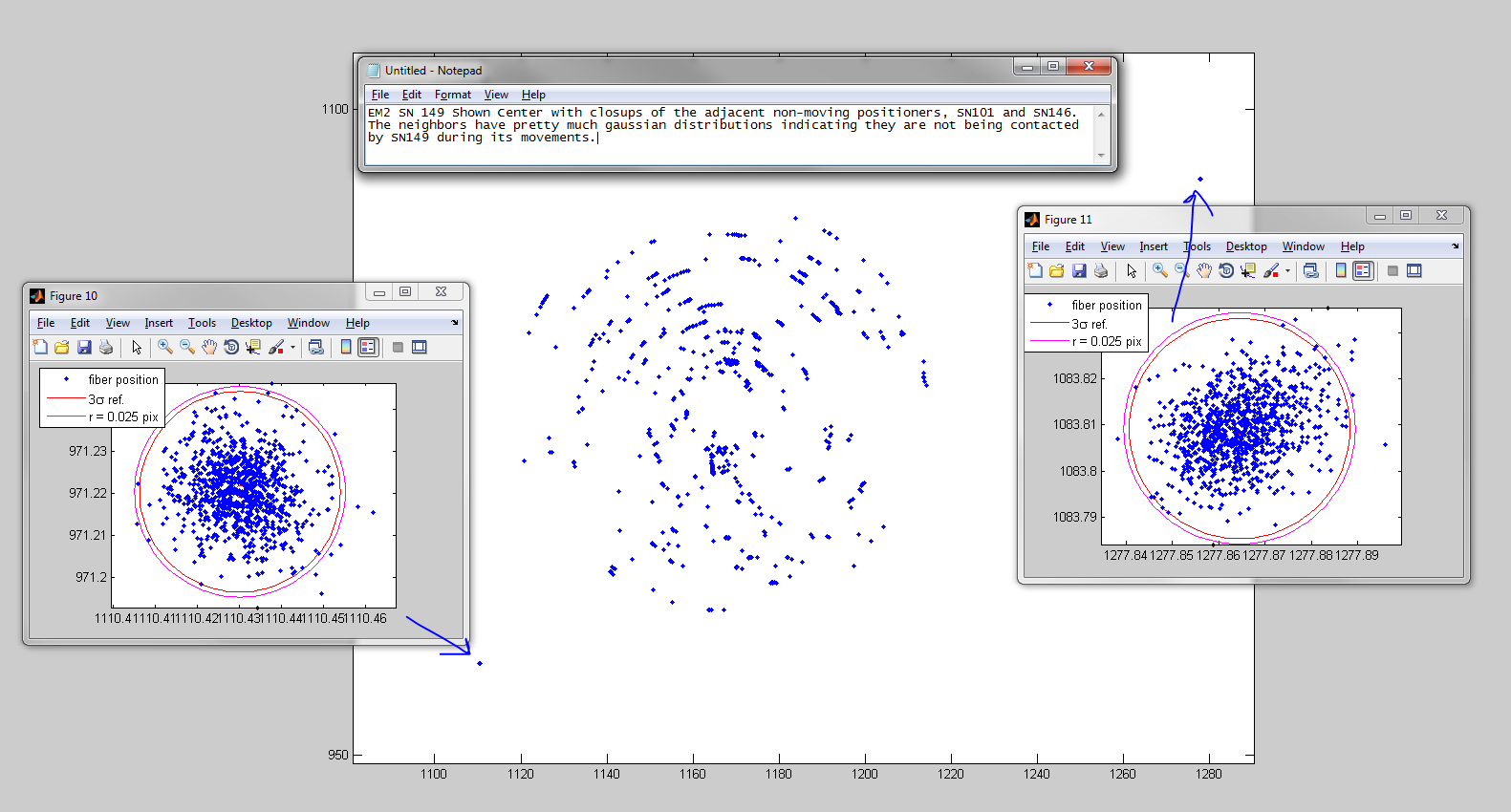
- Analysis of this last run reveals that there is not rubbing with neighboring positioners


| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
07_18_14_12_07_43_S1fw_onTimeTuning_pid5.PNG | r1 | manage | 254.7 K | 2014-07-23 - 17:09 | UnknownUser | |
| |
07_21_14_13_15_01_onTimeTuning_pid5.PNG | r1 | manage | 268.7 K | 2014-07-23 - 17:47 | UnknownUser | |
| |
PID5neighbors.PNG | r1 | manage | 109.7 K | 2014-07-23 - 17:09 | UnknownUser | |
| |
map1tests.png | r1 | manage | 14.9 K | 2014-07-23 - 17:10 | UnknownUser | |
| |
mmap_ARM_DATA_5.png | r1 | manage | 17.5 K | 2014-07-23 - 17:48 | UnknownUser | |
| |
motormap1.png | r1 | manage | 14.2 K | 2014-07-23 - 17:10 | UnknownUser |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
This topic: Subaru/PFS > WebHome > POSitionerEM > EM149
Topic revision: r1 - 2014-07-23 - ChazMorantz
Ideas, requests, problems regarding TWiki? Send feedback